Appearance
红黑树
二叉查找树是最常用的一种二叉树,但是在频繁的动态更新过程中,可能出现树的高度远大于 log2n,从而导致性能下降。极端情况下,二叉树退化成链表,此时时间复杂度退化为 O(n)。
要解决这个问题,就需要设计一种平衡二叉查找树。很多书籍里,但凡讲到平衡二叉查找树,就会拿红黑树作为例子。不仅如此,在工程中,很多用到平衡二叉查找树的地方都会用红黑树。你有没有想过,为什么工程中都喜欢用红黑树,而不是其他平衡二叉查找树呢?
什么是平衡二叉树查找树
- 平衡二叉树
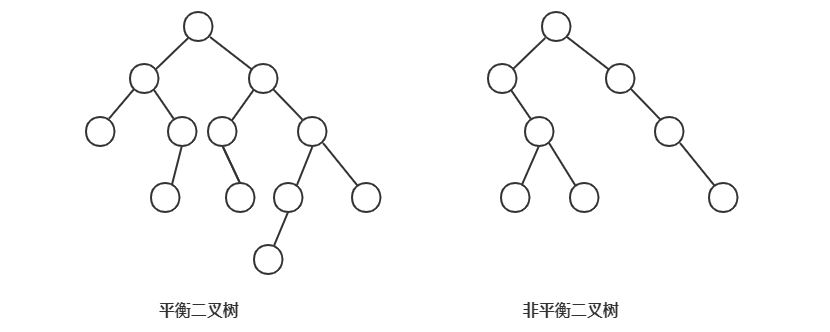
平衡二叉树的严格定义是:二叉树中任意一个节点的左右子树的高度相差不能大于 1。完全二叉树、满二叉树都属于平衡二叉树,但是非完全二叉树也有可能是平衡二叉树。
- 平衡二叉查找树
不仅要满足平衡二叉树的定义,还要满足二叉查找树的定义。最先被发明的平衡二叉查找树是 AVL 树,它严格满足平衡二叉查找树的定义,是一种高度平衡的二叉查找树。
而实际上,很多平衡二叉查找树其实没有严格符合上面的定义(二叉树中任意一个节点的左右子树的高度相差不能大于 1,比如下面的红黑树),它从根节点到各个叶子节点的最长路径,有可能会比最短路径大一倍。
发明平衡二叉查找树这类数据结构的初衷是,解决普通二叉查找树在频繁的插入、删除等动态更新的情况下,出现时间复杂度退化的问题。
平衡二叉查找树中“平衡”的意思,其实就是让整棵树左右看起来“比较对称”、“比较平衡”,不要出现左子树很高、右子树很矮的情况。这样就能让整棵树的高度相对低一些,相应的插入、查找、查询等操作的效率高一些。它是为了解决二叉查找树频繁插入、删除之后,时间复杂度的退化问题。
所以设计一棵平衡二叉查找树,只要树的高度不比 log2n 大太多(依然是对数量级),尽管不满足严格的平衡二叉查找树的定义,但仍然可以说是一棵合格的平衡二叉查找树。
红黑树
提到平衡二叉查找树,听到的基本是红黑树,甚至会默认平衡二叉查找树就是红黑树。
定义
红黑树(Red-Black Tree,R-B Tree)是一种不严格的平衡二叉查找树。顾名思义,红黑树中的节点,一类被标记为黑色,一类被标记位红色。除此之外,一棵红黑树还要满足一下要求:
- 根节点是黑色的;
- 每个叶子节点都是黑色的空节点(NIL)。也就是说,叶子节点不存储数据;
- 任何相邻的节点都不能同时为红色。也就是说,红色节点是被黑色节点隔开的;
- 每个节点,从该节点到其可到达的叶子节点的所有路径,都包含相同数目的黑色节点。
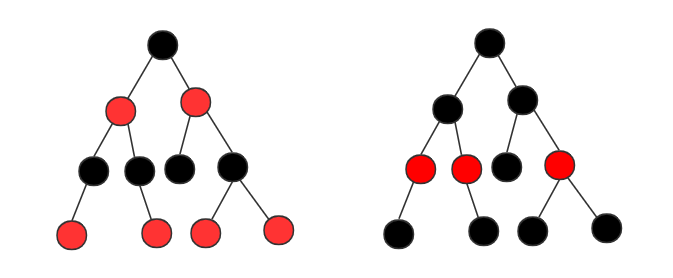
第二点稍微有些奇怪,它主要是为了简化红黑树的代码实现设置的。暂不考虑这点,忽略掉之后红黑树的图例为:
为什么说红黑树近似平衡
平衡二叉查找树是为了解决二叉查找树频繁插入、删除之后,时间复杂度的退化问题,“平衡”等价为性能不退化,“近似平衡”就等价为性能不会退化太严重。
二叉查找数的操作性能和高度成正比。一棵及其平衡的二叉树(满二叉树或完全二叉树)的高度约为 log2n,所以要证明红黑树近似平衡,只要分析说明红黑树的高度近似为 log2n 就好。
- 去掉红色节点之后,只包含单纯黑色节点的红黑树的高度不超过 log2n。
把红黑树中的红色节点去掉后,红黑树就变成三叉树或者四叉树。红黑树的定义要求每个节点,从该节点到其可到达的叶子节点的所有路径,都包含相同数目的黑色节点。所以这个时候,从三叉树或者四叉树中取出某些节点放到叶子节点的位置,它就变成完全二叉树。
而前面说到,完全二叉树的高度近似为 log2n,而三叉树或四叉树的高度要小于完全二叉树,所以去掉红色节点之后,只包含单纯黑色节点的红黑树的高度不超过 log2n。
- 加回红色节点之后,高度近似为 2log2n。
在红黑树中,红色节点不能相邻,也就是说,有一个红色节点就要至少有一个黑色节点,将它和其他红色节点隔开。
从上面知道,红黑树中包含黑色节点最多的路径不超过 log2n,所以加入红色节点之后,最长的路径不会超过 2log2n,也就说红黑树高度近似为 2log2n。
总结
为什么实际开发中都喜欢用红黑树,而不是其他平衡二叉查找树?
AVL 树是一种高度平衡的二叉树,所以查找的效率非常高,但是,有利就有弊,AVL 树为了维持这种高度的平衡,就要付出更多的代价。每次插入、删除都要做调整,就比较复杂、耗时。所以,对于有频繁的插入、删除操作的数据集合,使用 AVL 树的代价就有点高了。
红黑树只是做到了近似平衡,并不是严格的平衡,所以在维护平衡的成本上,要比 AVL 树要低。
红黑树的插入、删除、查找各种操作的性能都比较平衡,对于实际工程应用来说,为了支撑这种工业级的应用,更倾向于这种性能稳定的平衡二叉查找树。
不过最后要说的是,红黑树的代码实现难度有些高,自己实现的话,更倾向于用跳表代替。