Appearance
散列表
散列表英文叫作 Hash Table,平时也叫“哈希表”或者“Hash 表”。
散列思想
散列表用的是数组支持按照下标随机访问数据的特性,所以散列表其实就是数组的一种扩展,由数组演化而来。可以说没有数组就没有散列表。
看一个例子,现在有 89 名选手参加比赛,为了方便记录成绩,每个选手都有自己的编号。这 89 名选手的编号依次是 1~89。现在我们需要编程实现一个功能,通过编号找到对应的选手信息,怎么做?
那就可以把这 89 名选手的信息放到数组了,用编号对应下标,数组下标 1 放的是编号为 1 的选手信息,以此类推。这样通过编号获取选手 x 的信息的时候,只需要将下标为 x 的数组元素元素取出来就好,时间复杂度为 O(1)。
要是在编号上再加入其他信息,例如年级、班级这些信息,例如,010822:前两位 01 表示年级,中间两位 08 表示班级,后两位还是原来的表示编号 1~89,怎么实现刚才的功能?
还是一样通过数组来存储选手信息,这个时候不能直接用编号来当作下标了,但是可以截取后两位来作为下标存储对应的选手信息,那么处理和前面是一样的。
这就是典型的散列思想:
- 参赛选手的编号叫作键(key)(或关键字),用来标识一个选手;
- 把参赛编号转为数组下标的映射方法叫作散列函数(或“Hash 函数”,“哈希函数”);
- 散列函数计算得到的值叫作散列值(或“Hash 值”,“哈希值”)。
所以,散列表就是用数组支持下标随机访问时间复杂度为 O(1) 的特性。通过散列函数把键映射为下标,然后将数据存储到数组中对应下标的位置。当我们通过键来查询数据时,用同样的散列函数,将键转换为数组下标,从对应的下标位置获取元素。
散列函数
通过上面的例子,散列函数顾名思义就是一个函数,把它定义为 hash(key):
- key:就是元素的键值
- hash(key):就是散列函数执行计算之后得到的散列值
上面的例子,散列函数可以表示为:
js
function hash(key) {
var lastTwoChars = key.slice(-2);
var hashValue = parseInt(lastTwoChars, 10);
return hashValue;
}
这个散列函数还是比较简单的,刚刚的例子中,已经知道每个编号的定义和规律,所以散列函数只需要截取后面两位的编号作为散列值。但是如果参数选手的编号是随机生成的 6 为数字,或者用的是 a 到 z 的字符串呢?那这个散列函数就不行了。
散列函数设计的基本要求
散列函数设计的基本要求有 3 个:
- 散列函数计算得到的散列值是一个非负整数;
- 如果 key1 == key2,那么 hash(key1) == hash(key2);
- 如果 key1 != key1,那么 hash(key1) != hash(key2)。
第一点比较好理解,因为散列表是借助数组来实现的,而数组的下标是从 0 开始的,所以散列值也要是一个非负整数。
第二点也比较好理解,相同的 key,经过散列函数之后得到的散列值应该也是相同的。不然通过 key 存数据之后,再通过 key 来获取数据时就找不到对应的数据了。
第三点看起来合情合理,但是想找到一个不同的 key 对应的散列值不一样的散列函数,几乎不可能。即使是著名的 MD5、SHA、CRC 等哈希算法,也无法避免散列冲突。而且因为数组的存储空间有限,而散列值必须在这个范围内,这也加大了散列冲突的概率。
所以几乎无法找到一个完美的散列函数,即使找到,也需要很大的成本,所以针对散列冲突,需要通过其他途径解决。
解决散列冲突
常用的解决散列冲突方法有 2 类:开放寻址法(open addressing)和链表法 (chaining)。
开放寻址法
开放寻址法的核心思想就是:如果出现了散列冲突,就重新探测一个空闲位置,将其插入。先看一下比较简单探测方法——线性探测。
- 线性探测
- 插入数据
往散列表插入数据,如果这个键经过散列函数散列之后,得到的散列值对应的存储位置已经被占用了,那么就从当前位置,依次往后找,看是否有空闲位置,直到找到为止。
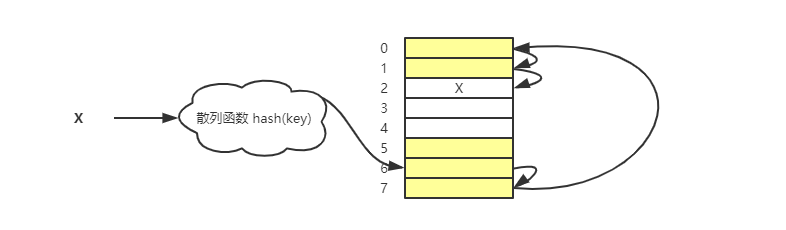
X 经过散列函数计算后,应该要放到下标为 6 的位置,但是这个位置已经有数据了,所以从当前位置依次遍历,看是否有位置,到尾部依然没有,则再从表头开始找,直到找到空位 2,将其插入。
- 查询数据
查询数据的过程类似于插入数据,根据散列计算得到的散列值,获取数组下标为散列值的元素,把它和要查找的元素相比。如果相等,则说明是要查找的元素;否则就顺序往后依次查找。
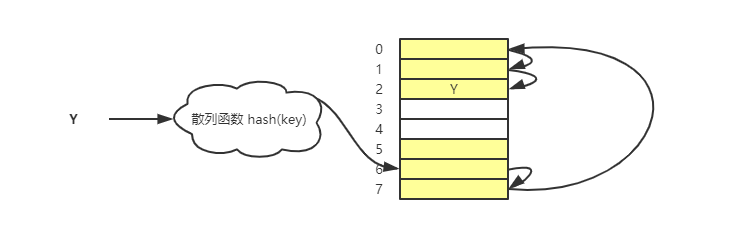
查询的时候根据散列计算得到的散列值,获取数组下标为散列值的元素,把它和要查找的元素相比。这里查找的时候是通过 key,是不是存储的时候把 key 也存储了?不然怎么判断是不是要查找的元素?
如果遍历到数组中的空闲位置,还没有找到,就说明要查找的元素并没有在散列表中。这是因为插入数据遇到散列冲突时,是通过依次往后遍历查找空闲的位置的,所以遍历查找的时候,如果有空位,则说明根本就没有插入这个数据,即不存在。
- 删除数据
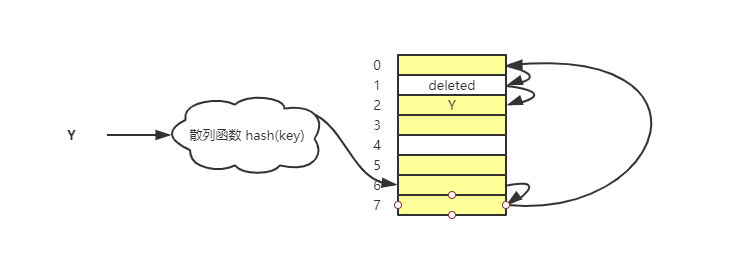
删除数据有点特别。不能单纯的将要删除的元素设置为空,不然就会出现查询的时候差不多数据的情况。
可以将删除的元素标识为 deleted,这样查询的时候遇到 deleted 时不要停下来,继续往下探测。
线性探测存在的问题:
当散列表的数据越来越多时,散列冲突的概率就越来越大,随着空闲位置越来越少,那么探测时间就会越来越长。极端情况下,我们可能需要探测整个散列表,所以最坏情况下的时间复杂度为 O(n)。同理,在删除和查找时,也有可能会线性探测整张散列表,才能找到要查找或者删除的数据。
- 二次探测
二次探测类似于线性探测,区别是,线性探测的步长是 1,二次探测的步长是“二次方”。
// 线性探测探测的步长是 1,探测的下标序列如下
hash(key) -> hash(key)+1 -> hash(key)+2 -> ...
// 二次探测探测的步长就变成了原来的“二次方”,探测的下标序列如下
hash(key) -> hash(key)+1^2 -> hash(key)+2^2 -> ...
- 双重散列
所谓双重散列,就是不仅要使用一个散列表,而是通过一组散列函数 hash1(key)、hash2(key)、hash3(key) ...。先用第一个散列函数,如果计算出来的位置被占用了,就用第二个,直到找到空闲位置。
以上这些方法,都是当散列冲突时,通过查找另一个空闲位置来解决。但是,不过哪种探测方法,当散列表中的空闲位置不多时,散列冲突的概率都会大大提高。
为了尽可能保证散列表的操作效率,一般情况下,会尽可能保证散列表中有一定比例的空闲槽位。我们用装载因子(load factor)来表示空位的多少。
装载因子的计算公式是:
装载因子 = 填入表中的元素个数 / 散列表的长度
也就是,装载因子越大,空闲位置越少,冲突概率越大;反之,装载因子越小,空闲位置越多,冲突概率越小。
链表法
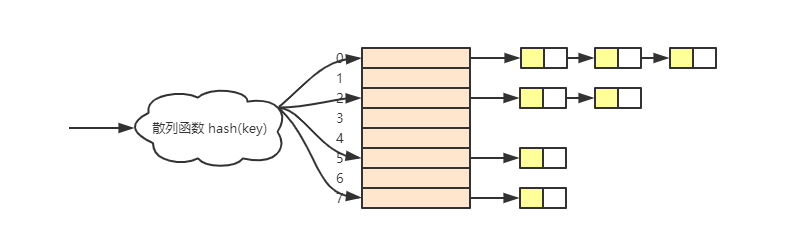
链表法是一种更加常用的散列冲突解决方法。相比开发寻址法,它也更加简单。如图所示,散列表中每个槽(slot)或者桶(bucket)都会对应一条链表,散列值相同的元素都放到相同槽位对应的链表中。
插入数据的时候,通过散列函数计算得到的散列值对应到散列槽位,将数据插入到槽位中链表即可,时间复杂度为 O(1)。
查询和删除的时候,也需要根据散列值对应到散列槽位,然后遍历链表进行查找或删除。时间复杂度为 O(k),k 为链表的长度。
对于比较均匀的散列表来说,每条链表的长度 k = n/m,n 为散列中数据的个数,m 为散列中槽位的个数。
总结
散列表来源于数组,它借助散列函数对数组这种数据结构进行扩展,利用的是数组支持按照下标随机访问元素的特性。
散列表两个核心问题是散列函数设计和散列冲突解决。散列冲突有两种常用的解决方法,开放寻址法和链表法。散列函数设计的好坏决定了散列冲突的概率,也就决定散列表的性能。